Rotrics DexArm on Hexbot Roboticsin kehittämä työpöydälle sopiva neliakselinen käsivarsirobotti. Laitteen erikoisuutena mainostetaan patentoitua hidastustekniikkaa, jonka ansiosta se soveltuu suurta tarkkuutta vaativiin toimintoihin kuten esimerkiksi 3D-tulostukseen ja laserkaiverrukseen.

Robotin kehitys rahoitettiin joukkorahoituksen voimin vuonna 2019. Kickstarterissa käynnistetyn kampanjan tavoitteena oli kerätä kehitykseen 50.000 dollaria ja tavoite täyttyi jo ensimmäisen viiden minuutin aikana. Kickstarterin kampanja tuotti lähes 850 000 dollaria mutta koska kysyntä ei vielä siihen loppunut, käynnistettiin toinen kampanja Indiegogon puolella. Jälkimmäinen on puolestaan tuottanut tähän mennessä reilu 1,2 miljoonaa dollaria – yhteensä rahoitusta on siis kerätty jo yli 2 miljoonaa dollaria. Ensimmäinen kampanja sai nimensä yrityksen perusteella (Hexbot), jälkimmäisessä käytettiin mukana tuotenimeä Rotrics DexArm. Yksi tekijöistä suuren suosion takana on modulaarisuus ja järjestelmän halpa hinta. DexArmia mainostetaan “all-in-one” ratkaisuna johon on edullisesta hinnasta huolimatta saatavilla laaja valikoima erilaisia moduuleita.
- Kickstarter: https://www.kickstarter.com/projects/hexbot/hexbot-versatile-all-in-1-desktop-robot-arm-for-ev
- Indiegogo: https://www.indiegogo.com/projects/rotrics-the-modular-all-in-one-desktop-robot-arm#/
Monen muun joukkorahoitetun projektin tavoin tämänkin osalta aikataulut ylittyivät useaan otteeseen erilaisista viivästyksistä johtuen – viimeisimpänä toimitusaikataulut sotki koronavirus, joka sulki kiinassa robottia valmistavan tehtaan. Ensimmäiset laitteet toimitettiin asiakkaille vasta vuoden 2020 puolessa välissä – noin vuoden suunniteltua aikataulua myöhässä.
Savonian 3D-tulostuksen investointi- ja kehityshankkeessa on rakennettu Savonian uudelle kampukselle monipuolinen 3D-tulostusympäristö. Hexbot –kampanjan avautuessa kickstartterissa päätettiin Savonialla ilmoittautua projektiin mukaan sillä ajatuksella, että Hexbotista voisi saada työkalun opetuksen ja koulutuksen tueksi. Käsivarsirobotin hyödyntäminen 3D-tulostuksessa eroaa perinteisten 3D-tulostuslaitteiden käytöstä jo pelkästään suuren kokonsa vuoksi. Pienen, pöydälle sijoitettavan robotin avulla voidaan esitellä ja opettaa robottitulostuksen ominaisuuksia luokkaympäristössä ennen kuin siirrytään teollisuuskokoisten robottien pariin. Lisäksi robottia suunniteltiin käytettäväksi 3D-tulostuskurssien harjoitustöissä, yhtenä esimerkkinä robottitarttujien suunnittelu ja valmistus.
Hexbot tarjoaa Rotrics DexArmia nykyisin kolmessa erilaisessa ja hintaisessa paketissa. Vaihtoehtot yrityksen verkkokaupassa ovat “Starter”, “Maker” ja “Luxury” eroavat toisistaan sekä hinnaltaan että mukaantulevilta moduuleiltaan. “Starter” (660 dollaria) pitää sisällään robotin ja kynämoduulin, “Maker” (900 dollaria) lisäksi laser- ja 3D-tulostusmoduulit ja “Luxury” (1000 dollaria) edellisten lisäksi vielä pneumatiikkamoduulin. Lisäksi on mahdollista ostaa erillisiä lisämoduuleja kuten kameramoduuli, liukuraide tai liukuhihna. Kaiken kaikkiaan tarjolla ovat seuraavat moduulit:
- Piirtomoduuli
- 3D-tulostusmooduli
- Laser kaiverrus/leikkausmoduuli (0.25W, 0.8W tai 2.5W)
- Pneumatiikkamoduuli, joka sisältää paineilmalla toimivan tarttujan ja imukupin
- Liukuraide, joka lisää robotin ulottuvuutta
- Liukuhihna, jolla robotille voidaan tuoda kappaleita
- Turvakotelo, laservalon suojaukselle
- Kamera konenäköä varten
Rotrics DexArmin spesifikaatiot
- Toistotarkkuus: 0,05 mm
- Käyttöalue: 220 x 220 x 250 mm
- Koko: 175 x 128 x 315 mm
- Paino: 2,4 kg
- Maksimikuorma: 500 g
- Maksimiliikenopeus: 500 mm/s

Robotin ohjaus
Robotin ohjauksessa voidaan käyttää paketin mukana toimitettavaa kosketusnäytöllistä ohjainta tai tietokoneelle asennettavaa sovellusta. Ohjaimen etuna ovat sen isot kuvakkeet ja todella yksinkertainen käyttöliittymä. Näytön asemaa ohjaimessa toimittaa luultavasti rahansäästösyistä valittu resistiivinen kosketusnäyttö, jonka käyttäminen on välillä kankeaa. Ohjaimen perustoimintoihin sisältyy robotin akseleiden liikutteluun tarvittavat painikkeet, mutta liikenopeuden- ja matkan säätö siitä puuttuu kokonaan. Ohjaimen kotiruudulta löytyvät painikkeet kaikille robotin moduuleille, joiden lisäksi siinä on SD-kortin painike, asetukset, äänikomennot ja perusliikkeet. Vaikka robotin äänikomennot löytyivätkin ohjaimesta, ei sitä ominaisuutta ole vielä saatu valmiiksi ja se on luvattu tulevan seuraavissa päivityksissä.
Kosketusnäyttö toimii robotin perusliikettelussa ja komennoissa, mutta mikäli sillä haluaa tehdä jotain monimutkaisempaa toiminnallisuutta (esim. 3D-tulostusta), tulee robotin hallinta hoitaa tietokoneella asennettavan ohjelman avulla. Rotrics Studio on ilmainen Windowsille ja Macille saatavilla oleva sovellus DexArmin ohjaamiseen, jonka voi ladata osoitteesta https://www.rotrics.com/pages/download. Sovelluksen asentamisen lisäksi robotin yhdistämiseen Windowsille tarvitaan erillinen STM32 ajuri, jotta se saa muodostettua USB-yhteyden robottiin. Yhteys muodostetaan klikkaamalla linkkipainiketta sovelluksen yläreunasta ja valitsemalla oikea laite valikosta.
Rotrics studion välilehdet:
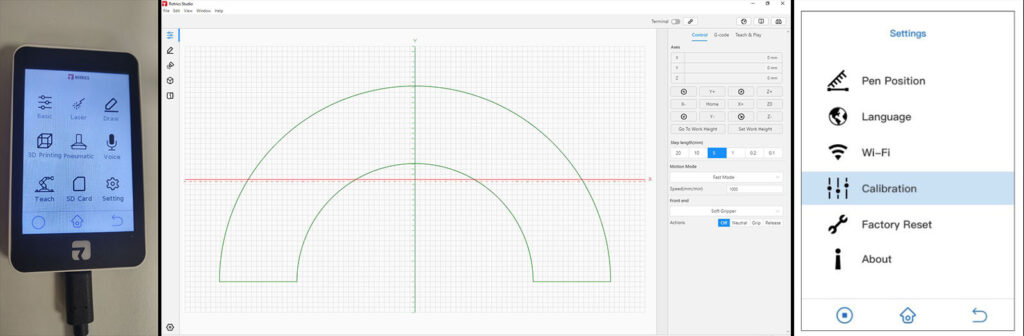
- Basic: Studion aloitus- eli basic välilehdessä on nähtävillä robotin koordinaatisto, jossa robotin ulottuvuus on nähtävissä puoliympyränä. Oikeassa reunassa on robotin liikutteluun tarvittavat kontrollit, liikenopeuden- ja matkan säätäminen, G-koodi tiedoston ajaminen ja teach&play, jossa voidaan opettaa robotille liikeratoja manuaalisesti.
- Write&Draw: Piirtovälilehdessä voidaan ajaa sovelluksen mukana tulevia piirroksia tai käyttää omia SVG-tiedostoja, joista sovellus generoi G-koodin robotille.
- Laser: Laser-välilehti on samanlainen kuin piirto, jonka lisäksi sieltä löytyy ohjaus laserin käynnistämiseen ja sen tehon säätämiseen.
- 3D Print: 3D-tulostusvälilehdestä löytyy STL-tiedostojen siivutusominaisuus ja tulostusalustan kalibrointi.
- Code: Koodivälilehdessä voidaan tehdä robotille yksinkertaisia ohjelmia koodipalikoiden avulla.
Studiosta löytyy myös robotin terminaali, josta voi katsella mitä koodia robotti on milläkin hetkellä ajamassa, ja sitä kautta voi lisäksi lähettää komentoja robotille.
Moduulit
Savonialle hankittu Hexbot oli mallia “Luxury” kit, joten robotin mukana tuli neljä erilaista moduulia jotka ovat näkyvillä alla olevassa kuvassa. Kuvassa moduulit vasemmalta alkaen: Pneumatiikkamoduuli imukupilla ja tarttujalla, kynämoduuli, lasermoduuli, ja 3D-tulostusmoduuli. Moduulit kiinnitetään robottiin jousitoimisella pikakiinnityksellä, joka avautuu mekaanisesti nappia painamalla. Kiinnityksessä on myös 5-pinninen liitin sähköiselle ohjaukselle. Hieman harmillisena puutteena mukana ei tullut mekaanista tarttujaa, mutta toisaalta Hexbot tarjoaa verkkokaupassaan 20 dollarilla DIY –moduulia, jolla sellaisen voi toteuttaa itse.

3D-tulostusmoduuli
3D-tulostusmoduulin lisäksi 3D-tulostus tarvitsee toimiakseen tulostusalustan ja materiaalikelan langansyöttäjällä. Langansyöttö toimii ”bowden”-mekaniikalla, joka vähentää painoa robotin päästä tuottaen vähemmän rasitusta sen moottoreille. ”Bowden”-mekaniikassa langansyöttömoottori on sijoitettu tulostuspään ulkopuolelle, tässä tapauksessa suoraan lankakelan eteen, jossa se työntää tulostusmateriaalia syöttöputkeen. Alla olevassa kuvassa näkyvät 3D-tulostusmoduuli ja siihen liittyvät tarvikkeet.

Moduulin mukana tuleva lankakelan teline on valmistettu muutamasta akryylilevyn palasta ja laakereista. Kahta puoliskoa ei yhdistänyt mikään, joten teline oli todella löysärakenteinen kaatuen helposti. Asia korjattiin 3D-tulostamalla tuet molempiin päihin mustasta PLA-materiaalista. Alla olevassa kuvassa näkyy testituloste valmiina sekä lankakelan telineeseen valmistetut tuet.
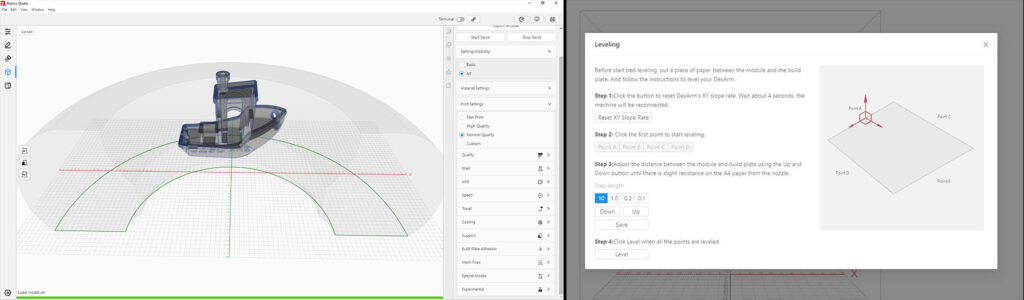
Robotin tulostusominaisuutta kokeiltiin 3D-tulostimien testaamiseen tarkoitetulla ”Benchy”-laivalla. Siivutukseen käytettiin Cura-sovellusta ja Rotricsin sivulta löytyvää tulostinprofiilia. Tulostus oli ensimmäinen testi, joten säädöt eivät olleet vielä ihan kohdallaan. Kappaleeseen on jäänyt paljon seittiä eli ”stringausta”, joka johtuu huonosti säädetystä retraktiosta. Kaikesta huolimatta kappaleen pinnanlaatu on hyvä ja luvatun tarkkuuden mukainen.

Rotrics Studion 3D-tulostusominaisuus sisältää oman siivuttajansa, joka vastaa ominaisuuksiltaan Curan sovellusta. Koordinaatistossa on nähtävillä kolmiulotteinen robotin ulottuvuuslaatikko kappaleiden asettelun helpottamiseksi. 3D-tulostus valmistellaan lisäämällä sovellukseen haluttu malli, joka on oikeassa tiedostomuodossa. Seuraavaksi ikkunan oikeasta reunasta määritetään tulostukselle halutut parametrit, jonka jälkeen g-koodi voidaan generoida. G-koodi voidaan myös valmistella kolmannen osapuolen sovelluksella kuten esimerkiksi Curalla, jota valmistaja suosittelee käyttämään. Tulostinprofiili Curaan löytyy osoitteesta https://www.rotrics.com/pages/download
Ennen 3D-tulostuksen aloittamista tulostusalustan reunojen nollakohdat täytyi kalibroida, niin kuin kaikissa muissakin pursottavissa 3D-tulostimissa. Tavallista tulostimista poiketen robotti täytyy kuitenkin kalibroida uudestaan, jos petiä tai robottia siirtää. Kalibroinnin voi tehdä ohjaimen tai sovelluksen avulla. Jälkimmäisessä kalibroinnin vaiheet on selitetty tarkemmin, joten sen avulla kalibrointi on helpompaa kokemattomalle käyttäjälle.
Kalibrointi
- Siirrä robotti ylämaksimiasentoon ja syötä komennot M889 ja M1112 terminaaliin. Tämä kalibroi robotin liikealueen ja siirtää sen kotiasemaan.
- Avaa tulostuksen kalibrointityökalu klikkaamalla ”Level”-painiketta.
- Klikkaa ”Reset XY Slope Rate”-painiketta.
- Aseta tulostuspeti 15 cm päähän robotista.
- Kalibroi alustan neljä kulmaa ohjeiden mukaan. Muista klikata ”Save”-painiketta jokaisen kulman jälkeen.
- Klikkaa ”Level”-painiketta
Viimeiseksi määritetään nollakohta kalibroimalla tulostuskärki alustan keskikohtaan ja klikkaamalla ”Set Work Height”-painiketta.
Piirtomoduuli
Piirtomoduuli on yksinkertainen kiinnitystyökalu maksimissaan 16 mm halkaisijaltaan oleville kynille. Työkalun käyttöönotto on helppoa, moduuli kiinnitetään ensin robottiin, jonka jälkeen käytettävä kynä kiristetään paikalleen. Seuraavaksi robotti asetellaan piirrettävän kohteen keskikohtaan niin, että kynän kärki koskettaa sitä ja klikataan sovelluksesta nollakohdan määrityspainiketta, jonka jälkeen piirtomoduuli on valmis käytettäväksi.
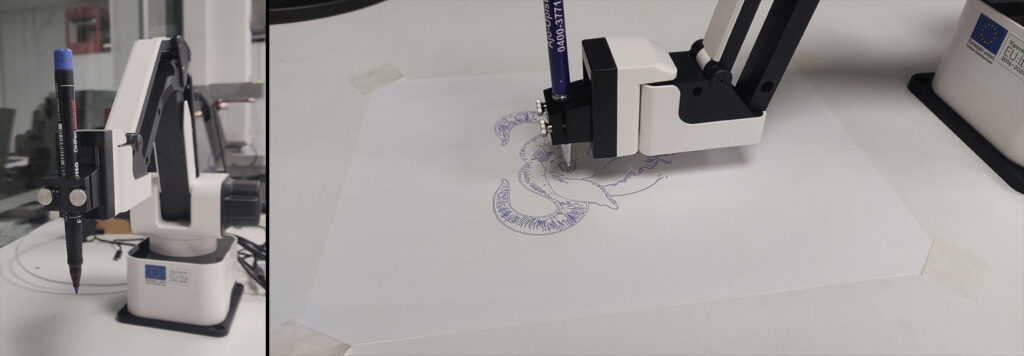
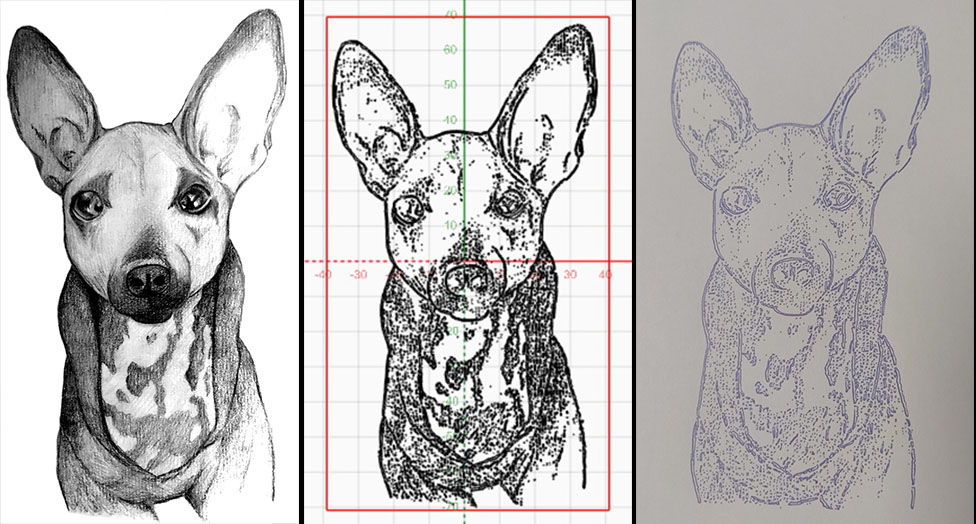
Piirtomoduulin testaukseen käytettiin lyijykynäpiirrosta sen pienen värimäärän takia. Kuva muunnettiin selainpohjaisella muuntimella (https://convertio.co/jpg-svg/) SVG – muotoon, jota robotin sovellus vaatii. Kuvan varjostukset kärsivät hieman muunnoksessa, mutta lopputuloksesta tuli melko hyvä. Piirros tehtiin käyttämällä tavallista mustekynää.
Lasermoduuli
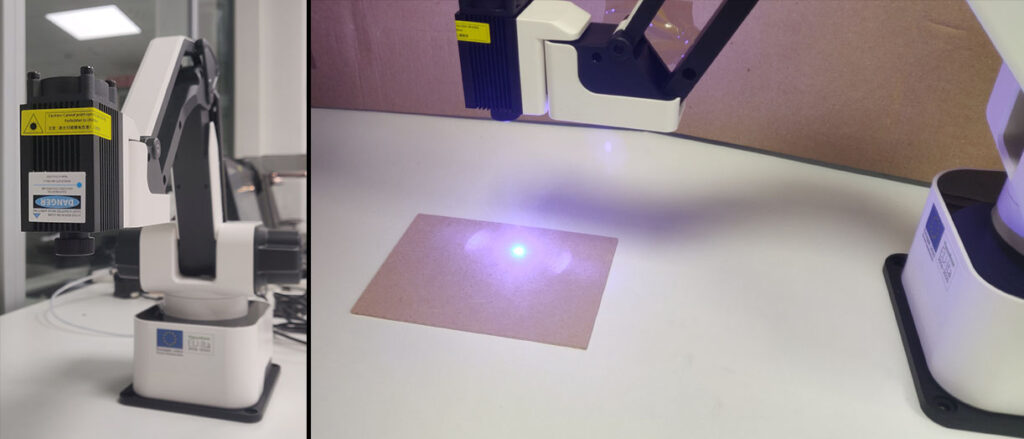
Robotin mukana tuleva lasermoduuli, jonka teho on 0.25 wattia ja aallonpituus 400–450 nanometriä. Moduulin mukana tulivat suojalasit, mutta sittemmin myyntiin on tullut myös koko robotin ympäröivä suojakotelo, joka mahdollistaisi moduulin käyttämisen esimerkiksi luokkatilassa. Laserin käyttöönotossa ei tarvita muuta kuin määritellä työtaso 10 cm päähän työstettävästä kohteesta, jonka jälkeen laserin polttopiste optimoidaan kohteen pintaan säätämällä se linssin säätöruuvista mahdollisimman kirkkaaksi.
Lasermoduulia testattiin sen mukana tulleeseen lastulevyä muistuttavaan laattaan. Laserilla oli vaikeuksia tuottaa jälkeä tähän materiaaliin ilman täysiä tehoja ja hidasta kuljetusnopeutta. Kokonaisen kuvan kaiverrusta ei pystytty kokeilemaan laboratoriotiloissa siitä aiheutuvan savumäärän takia.
Tehonpuutteen ovat havainneet myös kehittäjät, sillä mukana toimitettua 0.25W laseria ei ole enää edes yrityksen verkkokaupassa myynnissä. Tarjolla olevat lasermoduulit ovat nykyisin 0.8W hintaan 80 dollaria tai 2.5W hintaan 199 dollaria.
Pneumatiikkamoduuli
Pneumatiikkamoduuli sisältää kolmisormisen tarttujan, imukupin ja pumpun. Molemmat työkalut tulevat kiinni samaan moduuliin. Imukuppia voi käyttää tarttujan ollessa kiinni, ja tarttujaa käytettäessä imukuppi irrotetaan aukaisemalla yksi kiinnitysmutteri. Pumppu muodostaa putkeen joko yli- tai alipaineen, jonka avulla tarttuja ja imukuppi toimivat. Yhtenä robotin käyttötarkoituksena on toimia harjoitustöiden testialustana, ja yleisin harjoitustyö sille on jatkossa tarttujen suunnittelu ja valmistus erilaisten kappaleiden nostamiseen. Harjoitustöiden kannalta kiinteät tarttujan kärjet ovat helpompia suunnitella ja toteuttaa kuin paineilman vaikutuksesta supistuvat ja aukeavat kärjet. Tästä johtuen robotille muokattiin vaihtoehtoinen pneumaattinen tarttuja, jossa voidaan käyttää kiinteitä kärkiä.
Tarttujan kiinnitykseen käytettiin Thingiversestä (https://www.thingiverse.com/thing:4570070) löytyvää adapteria, joka pienen muokkauksen ja 3D-tulostuksen jälkeen soveltui Feston valmistamalle pneumaattiselle tarttujalle. Tarttujan ohjauksessa käytetään robotin omaa pumppua, joten se vastaa muuten toiminnaltaan mukana tulleen tarttujan käyttöä.

Sampsa Ylönen
projektityöntekijä, 3DTIK -hanke
Savonia-ammattikorkeakoulu
Antti Alonen
tki-asiantuntija
Savonia-ammattikorkeakoulu

Recent Comments